Introduction
Right angles help define the space around us. In addition to their usefulness for local space, right angles are necessary for understanding “inertial reference frames” used in Einstein’s theory of special (and general) relativity.
Four thousand years before Einstein, the Egyptians knew how to use geometry and four equally spaced right (90˚) angles for constructing the Pyramids of Giza. One might presume that right angles were significant to them.
The Greek philosopher and mathematician Pythagoras later was credited with the remarkable relationship where A2 + B2 = C2 for the sides of a right triangle. This was used by Einstein in his remarkable theoretical papers published in 1905.
Right angles are the foundation of the Cartesian coordinate system named after the French mathematician and philosopher Rene Descartes (Descartes). The Cartesian system is used for locating a position on a map in two dimensions, and it may be extended to mapping the three-dimensional space we observe locally. If we could expand this view to the far-reaches of the universe (we cannot), we could then mark any place by its universal x, y, and z coordinates. In the Cartesian description, x, y, and z represent orthogonal directions, requiring that each make the perfect 90˚ angle with all others. This view of space prevailed at the end of the 19th century.
Enter Einstein
Early in the 20th century, perceptions changed with Albert Einstein and his contemporaries (Einstein1905,Pais). In 1905, Einstein published his first five papers, two of which were concerned with what later became known as special relativity. In this theory, time and distance were described as interdependent. One of Einstein’s professors in Zurich, Herman Minkowski, was inspired after reading these, and he also began thinking and writing about time and distance. He proposed that time was similar (though not identical) to distance and that it should be considered as one of four dimensions in an expanded coordinate system, which later was named “space-time”; this was only two years after Einstein’s first papers were published (Minkowski,1907).
Four dimensions exceed the capacity of our visually attuned brains; the fourth dimension of time, though, may be imagined as a mathematical construct.
Inertial reference frames are needed for our local descriptions of the orthogonal space we experience around us. Minkowski, following Einstein’s lead, emphasized that within our (the observer’s) inertial reference frame, the time dimension could be imagined as orthogonal to each of the three dimensions, x, y, and z. But, if we view a second (observed) inertial reference frame (t′, x′, y′, and z′), which is moving with respect to our (the observer’s) inertial reference frame (t, x, y, and z), the observed four-dimensional moving frame could not be described by us as orthogonal. The t′, x′, y′, and z′ dimensions seen in a steadily moving frame would extend as straight lines to infinity, but the “angle” between the time, 𝑡, dimension and the direction of steady movement, say x, may not now be described by an observer as the perfect 90˚ angle.
What are the motivations of this lack of orthogonality, or a lack of a 90˚ “angle” between the time and space dimensions for an observed moving object? Minkowski’s reimagining of space and time grew from the thinking of leading theorists of the day: Lorentz, Poincaré, and the young luminary Einstein. Of course, the terms “moving” and “stationary” must be relative, which depends on the arbitrary choice of which frame one designates as the observer (stationary) and which frame contains the observed (moving) object; hence, the “relativity” of special relativity.
A Needed Explanation
So, what does orthogonality or the lack of it really mean? For this, we must turn to the inertial reference frames. Though the concept of an inertial reference frame is abstract, it is at the center of the theory of relativity. An inertial reference frame can never be perfectly realized beyond a small portion of space. It may be imagined, however, as a small floating laboratory traveling at constant velocity and in a straight line. Newton and Galileo, I believe, would have understood an inertial reference frame. Newton’s 1st law of motion states that a body will stay in motion, or at rest, until acted upon by force. In Newtonian physics, the entirety of the universe is one huge inertial reference frame; that is, the “Newtonian” universe would not be accelerating, that is, not acted upon by any external forces. Einstein, however, informed us that this abstract concept of the inertial reference frame should only be applied in very small regions of the universe. To expand to the entire universe would require a new theory, which he would soon present: that of general relativity. https://ronaldabercrombieblog.wordpress.com/wp-admin/post.php?post=287&action=edit
Returning to the special theory — a four-dimensional “steadily moving” inertial reference frame must lose its orthogonality when viewed from a “stationary” one. This is the motivating concept of special relativity. The “angle” between the directions of time and space of an observed moving frame becomes less than 90˚; why? We owe this insight foremost perhaps to Henrik Antoon Lorentz (1853-1928), a respected and beloved Dutch physicist, a contemporary of Albert Einstein, and for whom the transformations of special relativity have been named. Lorentz was an internationally renowned expert on light and its propagation, and he knew that, according to Maxwell’s theory of electromagnetism (1864), the speed of light, C, could be calculated directly from Maxwell’s equations: C2=1/ μ0· ϵ0.
The values, μ0 and ϵ0, the permeability and permittivity of free space, were known. Both constants, μ0 and ϵ0, are based on the definition of charge. μ0 has an assigned numerical value related to electric current, which is, of course, based on time, motion, and the definition of charge. ϵ0 is a constant representing the relationship between charge and electrostatic force. As both quantities are based on the coulomb, one may argue that they should have the same value in any laboratory or inertial reference frame in which one could measure a coulomb of charge, its movement, and its forces. The Lorentz transformation equations have been given his name and are identical to those presented by Einstein in his 1905 papers. Einstein derived these using only his firm conviction of the invariant nature of light speed. Lorentz, however, had based his equations on the invariant light speed measurements made by Michaelson and Morely in 1887.
History
Lorentz, who was older and much more well-known than Einstein at the time, was always very generous towards Einstein’s work. In 1906, concerning special relativity, he wrote: “…Einstein’s theory has a… marked advantage over mine…” (Lorentz).
Another prominent scientist, Jules Henri Poincaré(1854-1912), preceded Einstein in this concept that space and time are no longer fixed for an observed reference frame moving with a constant velocity relative to the observer. Poincaré, was a French “polymath” who excelled in many fields, including physics. He was a strong proponent of Lorentz’s ideas. He argued for the constancy of the speed of light. He stressed the invariance of x2+ y2+ z2 – C2t2, which, as we shall see, must have the same value for any inertial reference frame, stationary or steadily moving. In the following, the speed of light, C, will be given in units in which the speed of light, C = 1.
In 1905, Poincaré predicted gravitational waves. Einstein, near the end of his life, wrote that Poincaré’s ideas were somewhat like his own, and felt that Poincaré had deepened Lorentz’s earlier insights (Pais). Poincaré, however, never acknowledged Einstein’s work on special relativity in his public writings. He may have felt that they were like his, or he may have been reluctant to share credit or acknowledge Einstein’s deeper insights (Pais). He died at the age of 58 just a few years before Einstein’s breakthrough theory of general relativity was published in 1916.
It seems almost miraculous that the theory of special relativity (1905) requires only two simple and related postulates:
- All inertial reference frames are equivalent; that is, the laws of physics are the same in each.
- The speed of light is the same in any inertial reference frame.
Lorentz Transformation
It certainly may be said of Einstein that he was a deep thinker. His deep thinking began early. As a teenager, he considered the following thought experiment: What would happen if one could run as fast as the speed of light? He pondered this into adulthood. During his employment as a patent clerk in Bern, he came to a significant realization while walking and talking with his good friend Michael Besso. Apparently unaware of Lorentz’s, Poincaré’s, and others’ work, Einstein and Besso arrived at the conclusion that, if the speed of light is constant, then time, space, and simultaneity must change as an observed reference frame approaches light speed (Pais).
A critical point is that the speed of the observed reference frame must be a significant fraction of the speed of light if these differences in time and space are to become significant.
How do time and position in a “moving” frame (x′, t′ ) having a velocity β=V/C , transform relative to a “stationary” one (x, t )? These are given by the Lorentz equations:
x = γ ∙x′ +β∙ γ ∙t′ (1)
t = β∙ γ ∙x′ +γ ∙t′ (2)
where β=V/C and γ = 1/ (1- β2)½. V is the velocity of the primed reference frame relative to the unprimed one (or vice versa), and C is the speed of light. Both β and γ are scalars having no units or direction. Most scholars agree that although these transformations were known before Einstein, Einstein gave us their interpretation in terms that helped reimagine the fundamental structure of the universe (Pais).
To understand these transformations, it is convenient to use their changes (that is ∆t and ∆x) and define the invariant parameter, ∆τ, which was emphasized by Poincaré. ∆τ2=∆t2– ∆x2 is a combination of ∆t and ∆x and has the same value in any reference frame. Thus ∆τ, like C, is invariant. (∆x represents the product of the time change, ∆t, and the separation velocity, β, in the derivation of the Lorentz’s transformation equations shown below in the Figure.)
Application of the Pythagorean Theorem (A2+B2=C2); (Δt′2+(βΔt)2=Δt2) to the right triangle in this Figure yields: Δt = γ Δt′ with γ=1/(1-β2)½. Time appears dilated (slowed) in the moving frame when viewed from the stationary one: Δt = γ Δt′; γ ≥ 1; Δt′≤ Δt. Therefore, for an observer in the “stationary” frame, time in the “moving” (observed) frame would appear to pass more slowly: a speeding traveler (a twin, perhaps) returning to the point of origin will have aged less than the stationary twin.
Why could time and space not be the same for all reference frames? The answer reminds us of Einstein’s thought experiment of running so fast as to approach the speed of light. Since the speed of light cannot change, the only way around this dilemma is that the elapsed time and/or distance measurements for the “moving” frame, as observed from the “stationary” one, must change (Taylor, Wheeler; Meisner et al, Einstein(1905)). As previously mentioned, according to Einstein, this insight was suggested to him by Michele Besso, a lifelong friend —though it’s important to note that others had previously come to this conclusion.
The student should demonstrate that application of the Pythagorean Theorem in the Figure will show that ∆t 2-∆x 2 is the same for any frame. This relationship defines proper time, Δτ. Poincaré, like most theorists, used the negative of this relationship, but this detail is unimportant — either convention suffices.
∆t 2 – ∆x 2 = ∆t′ 2 – ∆x′ 2= Δτ 2. (3)
If, ∆ x′ = 0, then ∆t′=∆τ = proper time. For any observed inertial frame, the proper time is
Δτ =Δt(1-β2)½ . (4)
The student should check that the transformations given in equations (1) and (2) satisfy the invariance of ∆τ in equation (3) by inspecting the Figure and substituting equations (1) and (2) into (3). Thus, the two invariants, the speed of light (which will be presented here in more convenient “geometrized units” where C =1) and Δτ = “proper time” in any inertial reference frame must be included in our understanding of the structure of the universe.
The “angle”
The Figure illustrates the time dimension collapsing toward the direction of movement for an observed moving reference frame. This represents the essence of the statement that the moving frame no longer appears orthogonal for a stationary observer. For the observed frame moving with a velocity V (a fraction of the speed of light , C ), the time dimension may be depicted as forming an “angle” with the direction of steady movement like two blades of a pair of scissors. With increasing velocity, the time and space axes are squeezed together: time and space become compressed. This relationship is fully represented in the Lorentz transforms of equations (1) and (2).
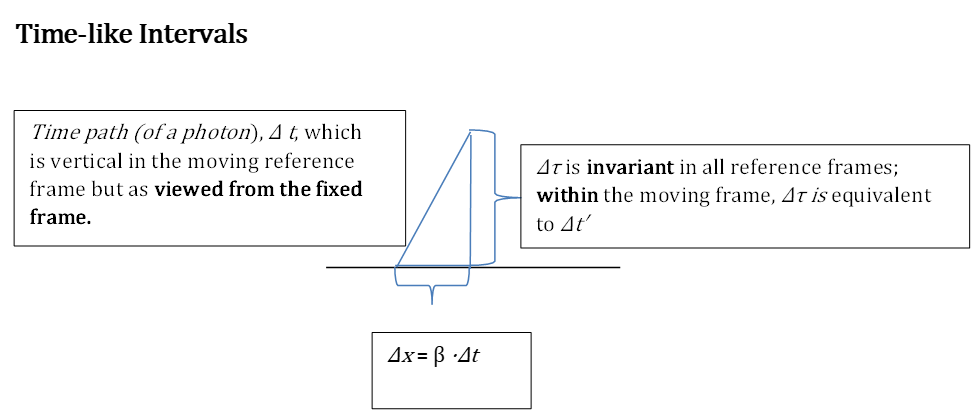
Fig. The “angle” or loss of orthogonality in an observed reference frame of constant velocity. In the figure, the vertical line is a vertical light path in a steadily moving frame as seen from within this steadily moving reference frame. It represents local time within the moving frame. The inclined line represents the vertical light path of the observed reference frame (steadily moving), as it would be described by an observer from within the stationary frame. Reference frame movement in this figure is postulated only in the x direction and moving to the right. The unprimed frame signifies the stationary one (observer); the primed reference frame, the moving one (observed). For events in the moving frame observed by the stationary observer, time, simultaneity, and lengths change, but the value of Δτ2=Δt2– Δx2 and the speed of light remain invariant. Only one assignment of distance/time satisfies this requirement: Δt=Δτ/(1- β2)½; Δτ =Δt′, and Δx = βΔt = βΔτ/(1+β2)½.
By this time, Einstein understood physics in local and steadily moving inertial reference frames. He also knew that the universe must be formed of many adjacent inertial frames and that no inertial frame should be unique. The laws of physics must be the same for each. The inertial reference frame became the elemental unit for building his theory of general relativity ten years later.
General relativity is all about gravity. What Einstein needed next was a way to connect the many adjacent inertial reference frames in such a way that gravity now reappears. How did he pull off bringing forth gravity from the inertial frames? This would require quite a bit more work and deep thinking on his part. Complementing his two 1905 papers with one in 1916 may be described as his intellectual “hat trick” of special and general relativity Einstein(1905), Einstein(1916).
Gravity and the theory of general relativity
Between 1905 and 1915, Einstein had the insight which he called the “happiest thought of his life” (Pais): that there is no difference between gravity and acceleration: These must be equivalent. If he wished to introduce gravity into the theory of special relativity, then all he needed to do was include gravitational acceleration. But if reference frames are considered “accelerating”, that is increasing speed, along one axis, say x, to account for the presence of gravity pulling in the opposite direction, then each observed reference frame must have a constantly changing “virtual gravitational velocity”. If each of these evolving frames has a different “velocity”, then each would require a different coordinate framework as prescribed by special relativity. This “angle”, or the lack of orthogonality, must become increasingly more acute with gravity’s acceleration (increasing gravitational “virtual velocity”). The angle should decrease with increasing gravitational pull. It sounds like a simple matter that an “angle” responsible for the curvature of space-time in general relativity should change with gravity; however, transforming this statement into a mathematically specific theory was quite a task. This took Einstein ten years. https://wordpress.com/post/ronaldabercrombie.blog/287
To put the physics of relativistic gravity into mathematics, Einstein first needed to use a general representation of gravitational force. Physics students know that, according to Newton and valid within the confines of any small, imagined inertial reference frame of local experience, the force of gravity between two mass objects contained within such a local frame is:
Where FG is the gravitational force, G is the universal gravitational constant, M is a larger mass, m0 is a test mass, and r represents the distance between these. The symbol êr is a unit vector pointing away from the larger mass.
From this, one may define a field potential, 𝛷, and a gravitational acceleration vector, 𝑔:
FG/m0 = 𝑔 = – 𝜕 𝛷 /𝜕space (6)
It is possible to put the Newtonian equations for gravitation into a general expression using the field potential, the universal constant of gravity, and mass density. This requires calculus and partial derivatives. The Newtonian expression for gravitational attraction becomes
𝜕2𝛷/𝜕x2+ 𝜕2𝛷/𝜕y2+ 𝜕2𝛷/𝜕z2 = 4𝜋G𝜌M. (7)
The symbol, 𝜌M is mass per unit volume. Equation (7) represents precisely the same physics as equations (5) and (6), only in a different form.
The crucial point in equation (7) is that partial derivatives appear in the general expression for gravity. Though easy to calculate within a local, inertial reference frame using fixed orthogonal coordinates, derivatives are not so easy for coordinate systems described of distant reference frames that may be viewed by us as accelerating. If an observed reference frame’s coordinates are changing because of gravity, then these coordinates must be constantly redefined. It would prove difficult to do these calculations.
It is not the purpose of this essay to describe Einstein’s solution to this difficult problem. However, by the time he began wrestling with it, the mathematical tools were already in place. For this, we owe thanks to Bernhard Riemann, Gregorio Ricci-Curbastro, Elwin Bruno Christoffel, and others for developing the mathematical field of tensor geometry.
Summary of Progression from Newtonian physics to general relativity (described for x, y, z, and t coordinates)
In Newtonian physics ̶ The reference frame for physics is orthogonal, fixed, and flat: The x, y, and z directions extend as straight lines to infinity, and all angles between coordinate directions are 90˚. Time is a separate entity, progressing steadily and uniformly forward.
In special relativity ̶ Time is added as a fourth dimension. The reference frames are flat; however, with the addition of steady motion, observed dimensions are no longer orthogonal: The directions of an observed frame extend as straight lines to infinity, but the angle between the time dimension and the coordinate direction of steady movement must be viewed as less than 90˚.
In general relativity ̶ With the inclusion of gravity (virtual acceleration), the many observed inertial reference frames are connected to form a curved geometric framework: Coordinate directions now do not extend as straight lines because the angles in the observed frames must be linked for the continuity of space and time, and consequently they generate gravitational curvature of space-time. Nevertheless, it remains true that for each local event in each small chunk of the universe and for each instant of time, there exists a local, inertial Lorentzian frame where the coordinates extend in straight lines as described in special relativity. Within an observer’s local inertial frame, the four coordinate directions are orthogonal.
The general theory changed our understanding of the universe. It is an understatement to say that cosmology has been profoundly changed by Einstein’s insights. General relativity has dominated cosmology for more than one hundred years. Einstein’s impact was recognized early and throughout his lifetime. There are still unanswered questions, of course, and many of these were proposed by the man himself.
With the launch of the Hubble telescope, we added important visual evidence that the universe is a very big place and that it is expanding at an increasing rate. So vast is the universe that it is almost beyond human comprehension. Einstein’s theories gave us tools to begin to explore this, bringing into sharper focus our concepts of space, time, direction, location, and the geometry of the universe.
Possible student exercises:
1.) Assume simultaneity, Δt′ =0, for two events occurring within a moving frame. Assume these events are separated by a distance Δx′ in this frame. Are these events also simultaneous for the observer in the stationary frame?
Answer: No, Δt =β𝜸Δx′.
2.) Assume no separation in distance along the x′ axis (Δx′ =0) between two events which are separated by a time delay Δt′ in a moving frame. This could represent two events occurring at different times along the y′ axis (vertical) for an inertial frame moving in a direction along the x axis (horizontal) of both frames. Will these events remain vertical when seen from the stationary frame?
Answer: No, Δx =β𝜸Δt′ … the y′ axis appears to the observer to lean forward
3.) Do some research and then explain Einstein’s extension of his descriptions of time and space in his fifth 1905 paper expanding his ideas to include momentum and energy. Use a metric of measurement where the speed of light, C=1.
Answer: Let x be defined as a three-dimensional vector within a local reference frame; p represents the corresponding three-vector for momentum, p =m∙dx/d𝜏 . Einstein used the invariant infinitesimal of time, d𝜏, for his calculations. Within any inertial frame dt’ = d𝜏. He proposed that relativistic energy should be given by E =m∙dt/d𝜏, with d𝜏=dt’ = dt(1-β2)½ . This definition of invariant time may be seen in the Figure. Then E =m∙dt/d𝜏 = m+½mβ2+⅜mβ3+∙∙∙. From this and recognizing that the standard non-relativistic kinetic energy (½mβ2) appears in the expression, he saw that there were other added terms, including one for the resting mass energy (Em=m, when β = 0), and additional terms as β increases. The student may wish to show, as Einstein did, that E 2=m2+p2, p =m∙β/(1-β2)½, E =m/(1-β2)½, and p/E =β.
Cited References
Isner, Martin, “Sticks, Stones, and Shadows: Building the Egyptian Pyramids”, Page 191, University of Oklahoma Press (2001)
Descartes, René, “Discourse on Method, Optics, Geometry, and Meterology”, Translated by PaulJ. Oscamp (Revised ed.) Indianapolis, Hacket Publishing (2001)
Pais, Abraham, “Subtle is the Lord… The Science and Life of Albert Einstein”, Oxford University Press (1984)
Minkowski, Hermann, “Das Relativitätsprinzip”. Annalen der Physik. 352 (15): 927–938. (1907)
Lorentz, Hendrik Antoon, “The theory of electrons and its applications to the phenomena of light and radiant heat”; a course of lectures delivered in Columbia University, New York, in March and April 1906
Taylor, Edwin F, and John Archibald Wheeler, “Spacetime Physics”. W.H. Freeman and Company, 1966
Meisner, Charles W., Kip S. Thorn, and John Archibald Wheeler, “Gravitation”. Princeton University Press (2017)
Einstein, Albert, “The Field Equations of Gravitation”, Preussische Akademie der Wissenschaften, Sitzungsberichte, (part 2), 844–847 (1916)
Einstein, Albert “On a Heuristic Point of View about the Creation and Conversion of Light”, Annalen der Physik (in German) 17 (6): 132–148 (1905)
General Sources
Bernard F. Schultz, “A First Course in General Relativity”. Cambridge University Press, 1985
Dale Corson and Paul Lorrain, “Introduction to Electromagnetic Fields and Waves. W. H. Freeman and Company, 1962
Walter Isaacson, “Einstein… His Life and Universe”. Simon & Schuster, 2007

Leave a comment